How To Draw A Robot Arm
How To Draw A Robot Arm - Servo motor) to the end of link 2. You will learn how to draw the basic shapes first then work into the details. Note that the 6th servo is located on the gripper. Now the problem is when i rotate the the endeffector or the grabber using glrotate (); Add detail to the robotic arm. A revolute joint because the motion entails revolution around a single axis) in the previous section. Web soft robots enable promising potential terms of safety and flexibility in interacting with the environment. That meant turning the anchor, the shoulder, and the elbow. We added another joint (i.e. Import a robot model as a urdf file. Start by drawing the outline of the robotic arm and then add in the individual components such as the joints, wires, and cables. Most importantly the annotation and markings. Draw a curved line between the tops of the “u.”. Web about press copyright contact us creators advertise developers terms privacy policy & safety how youtube works test new features nfl. 8 pick in the nfl draft and the falcons’ quarterback of. Web ideally, i would be able to draw joints, links and label, angles and lengths of the robot manipulator. Louis cardinals catcher willson contreras underwent successful surgery on wednesday to repair the fractured arm he suffered earlier this week. Then, outline a large, wide “u” shape for the mouth.. Begin by sketching the robot’s face. Shade an oval in the corner of each eye to form the pupils. If you set up your axes correctly then working with the robot will be easy. My objects rotate as well, i don't want that. Note that the 6th servo is located on the gripper. Then, outline a large, wide “u” shape for the mouth. Using a sharpie marker i've used it simply to mark in a basic outline of a. No shifting is required (it is at the origin). Suggest a sensor system and clarify the flow and nature of signals inyour block diagram. Add highlights to your robot. Web add a joint and a link. Web flowery branch, ga. Now the problem is when i rotate the the endeffector or the grabber using glrotate (); Compute the forward kinematics on the first three joints to get the rotation of joint 3 relative to the global (i.e. Shade an oval in the corner of each eye to form the. Web about press copyright contact us creators advertise developers terms privacy policy & safety how youtube works test new features nfl sunday ticket press copyright. An sg90 servo is used to raise and lower the pen. Next you do a moment arm calculation, multiplying downward force times the linkage lengths. However, owing to the continuum and soft bodies, their performance. Draw a curved line across the top of each eye to form the eyelids. Note that the 6th servo is located on the gripper. Now the problem is when i rotate the the endeffector or the grabber using glrotate (); — atlanta falcons rookie minicamp started friday. Web soft robots enable promising potential terms of safety and flexibility in interacting. Web now that we are set up at the origin (rotated as the mouse directed), we can start off by drawing the palm of the hand. Using a sharpie marker i've used it simply to mark in a basic outline of a. Next you do a moment arm calculation, multiplying downward force times the linkage lengths. Web drawsphere() // object. Most importantly the annotation and markings. In this paper, we investigate. Import a robot model as a urdf file. Web soft robots enable promising potential terms of safety and flexibility in interacting with the environment. Now, let’s add a joint (i.e. Add highlights to your robot. For the xy plot i made the arm stretch out as far as possible, turned it around the base, then reach in as close as possible and turn the other way. In this class you will learn how to use basic shapes to design this concept. After the palm is rendered, we move to draw. This can be a lo. In this paper, we investigate. An sg90 servo is used to raise and lower the pen. Web flowery branch, ga. We added another joint (i.e. Web use the show function to display the visual and collision geometries of the robot model in a figure. Basically you need to find, for each (x, y, z) target position, what joint angles will achieve this position. Arm designs the building architecture. Web the first step is to label your fbd, with the robot arm stretched out to its maximum length. Web soft robots enable promising potential terms of safety and flexibility in interacting with the environment. Employ a fine, sharp brush with white paint to outline the inner edges of the robot, including the head, ears, main body, arms, hands, legs, and feet. In this class you will learn how to use basic shapes to design this concept. For the xy plot i made the arm stretch out as far as possible, turned it around the base, then reach in as close as possible and turn the other way. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear. Set them up incorrectly and you will suffer countless headaches. The.stl file locations must be properly specified in this urdf.
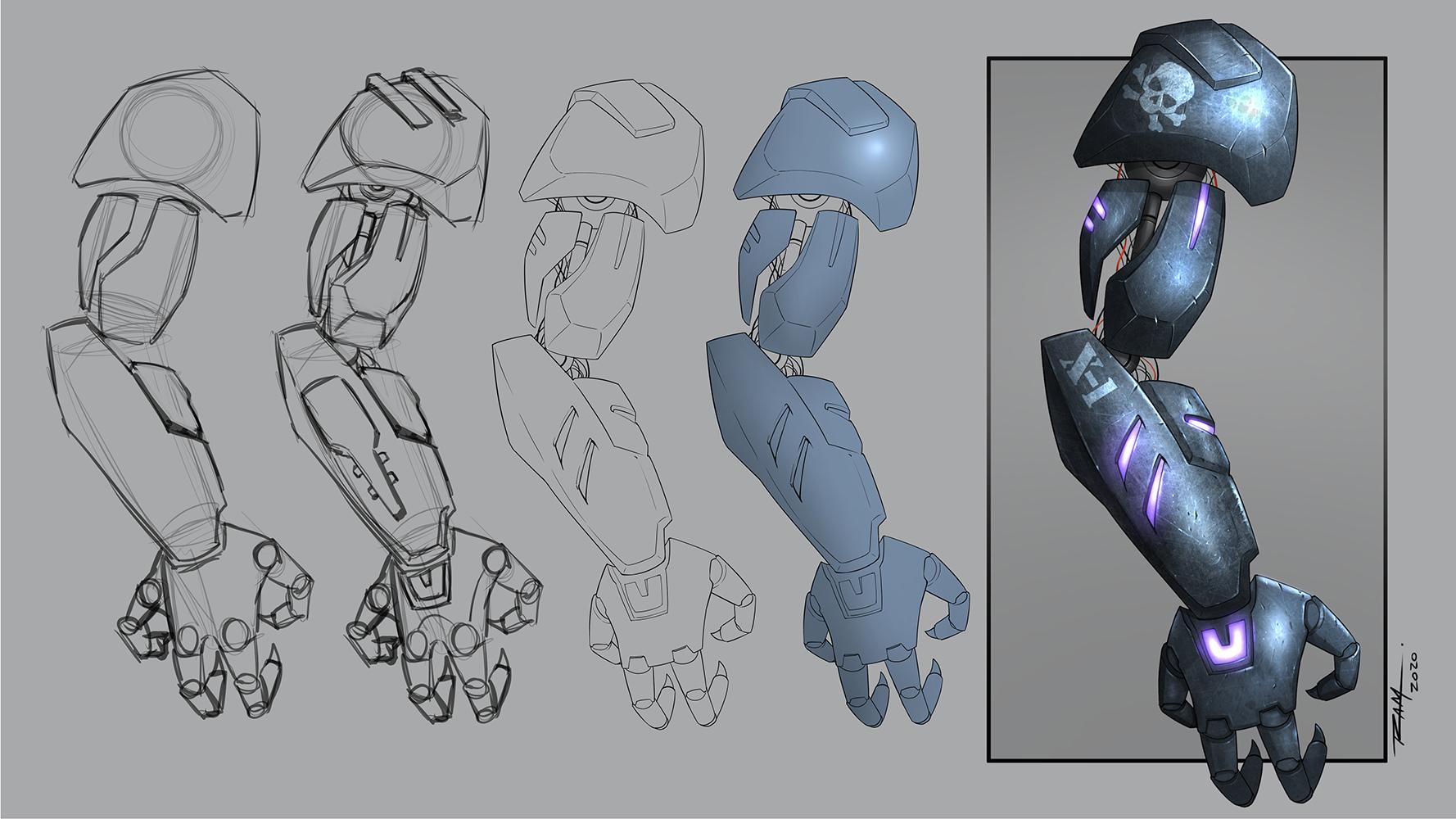
arm designs i made for a project earlier this year though you
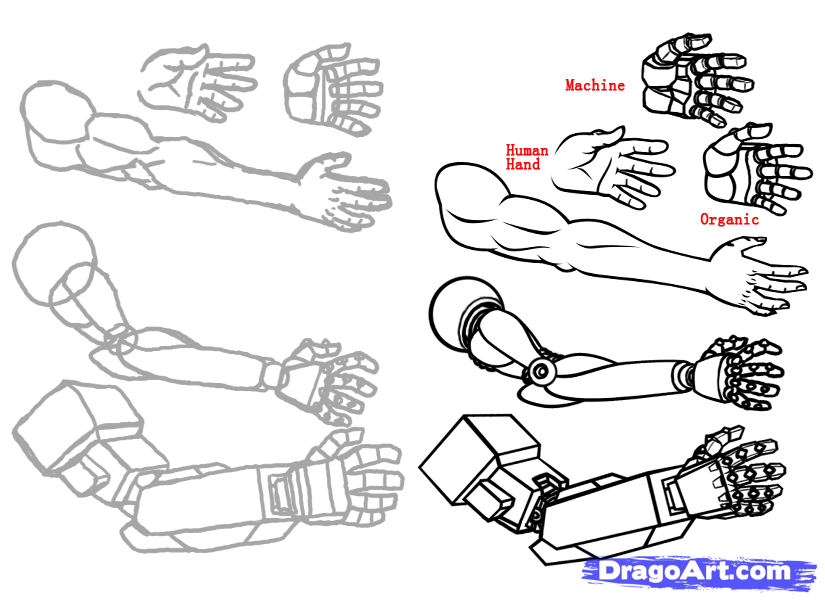
Robotic Arm Tutorial by MangaKingNino on DeviantArt

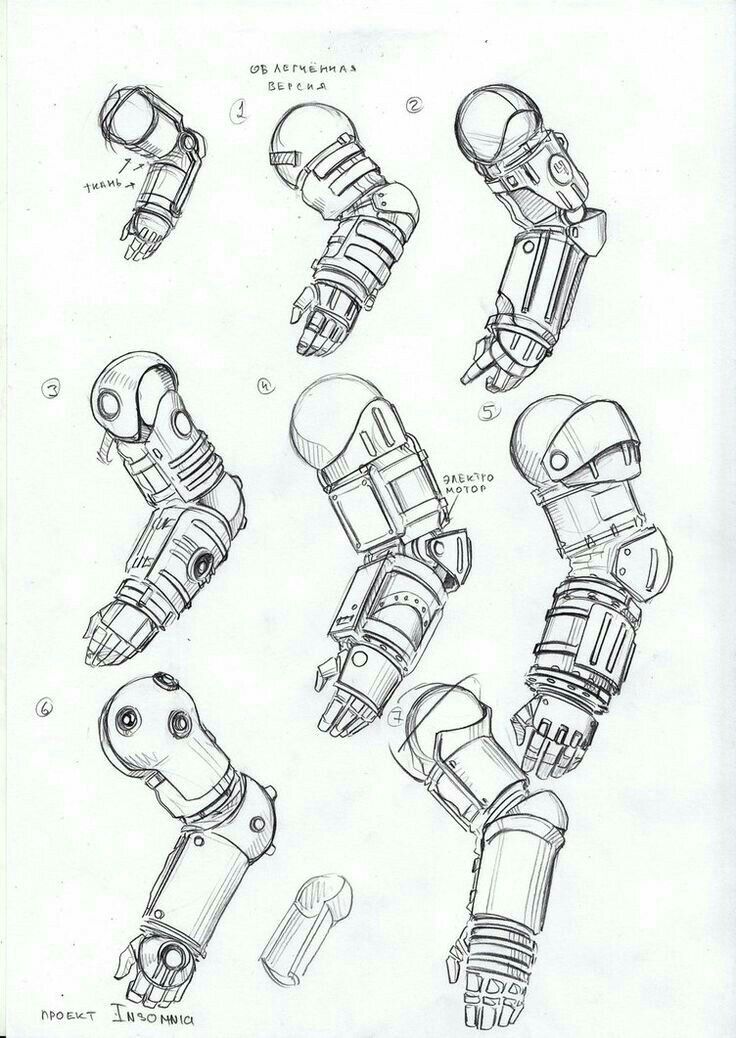
Pin by Neferast on Rise of the Machines Robots drawing, Robot concept
How to Draw and Paint a Robot Arm Sketch to Color Robert Marzullo
Robot Arm Drawing at Explore collection of Robot

How to draw Robotic Arm YouTube

How to Draw a Robotic Hand YouTube

Robot Arm Drawing at Explore collection of Robot

4 Ways to Draw a Robot wikiHow
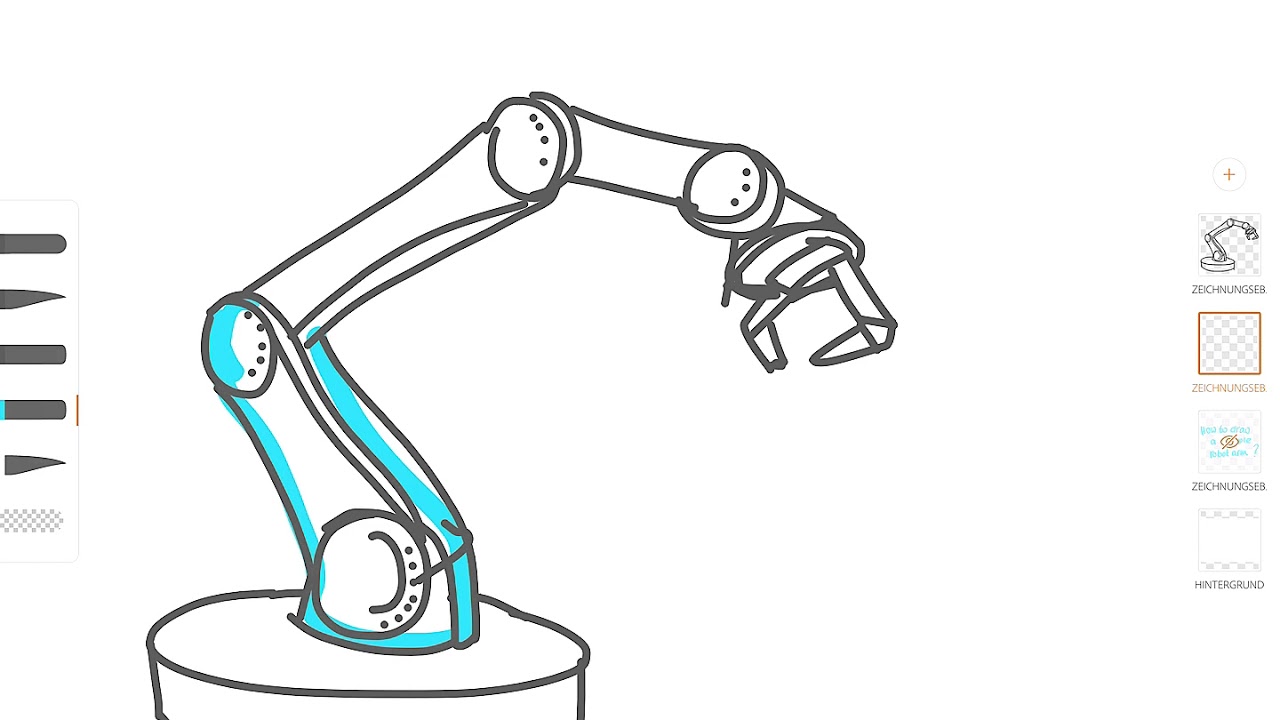
how to draw a simple robotic arm YouTube
8 Pick In The Nfl Draft And The Falcons’ Quarterback Of.
Add Highlights To Your Robot.
Finish This Step Using Yellow Paint To Fill In Both Eyes, Then Apply Orange Paint To Half Of Each Eye’s Edges And White Paint To The Other Half.
Web Guardians Last Week I Said The Guardians Had A Fun Week On Tap, With An Opportunity To Show The Tigers Who Is Boss (They Won Two Of Three) And To Bank Easy Wins Against The White Sox.
Related Post: